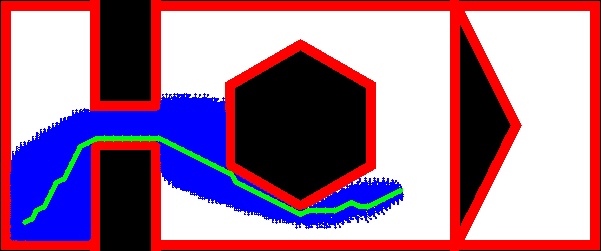
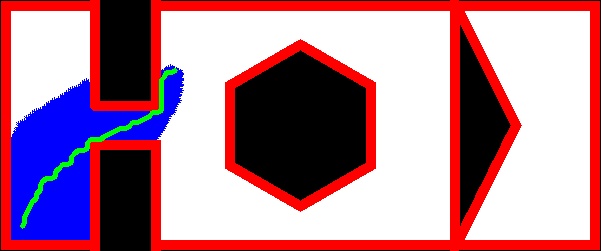
A-Star Implementation
Created an occupancy grid map with inflation based on half plane methods for a provided autocad map and implemented A-star path planning for a rigid robot
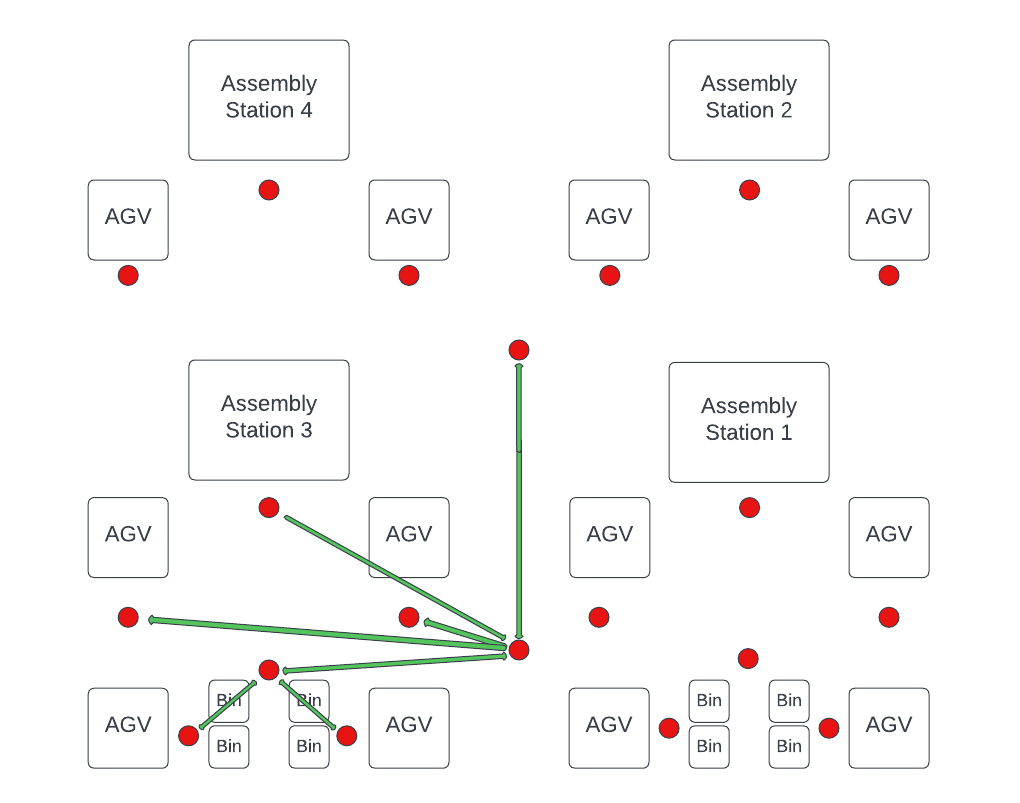
Warehouse Simulation
Created a simulation package to evaluate the robustness of the localization package on a robot in a simulated environment where the environment changes over time and the robot is required to execute tasks/routines in the changing environment without re-mapping the environment




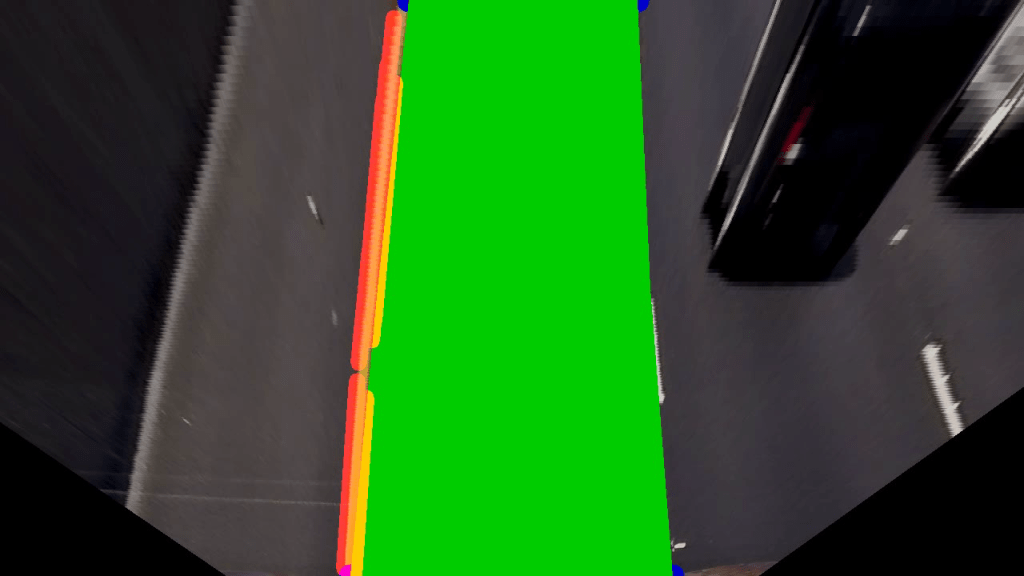
Advanced Lane Detection
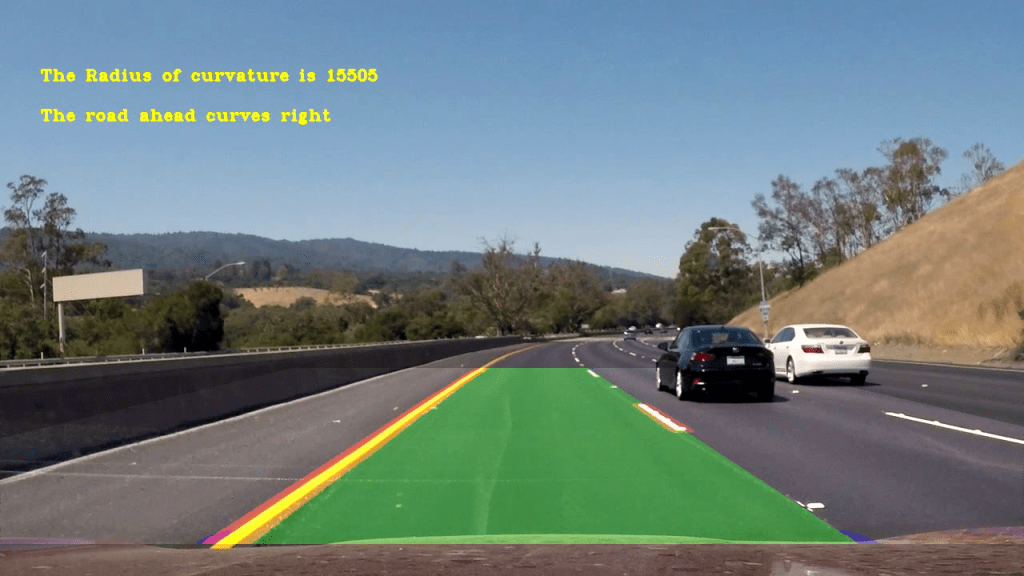
Performed advanced lane detection and turn prediction using OpenCV on Advanced Lane Detection dataset from Udacity. The developed code was made robust to handle cases when lanes could not be detected, handle erroneous frames and also segment solid and broken lines .

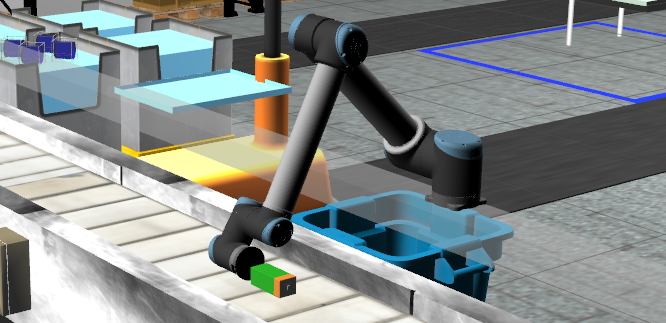
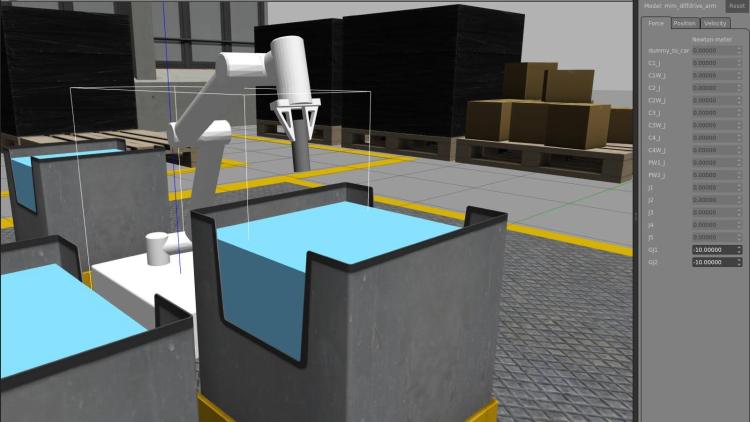
ARIAC
The goal of the competition is to test the agility of industrial robot systems, with the goal of enabling industrial robots on the shop floors to be more productive, more autonomous, and to require less time from shop floor workers. It focuses on :
- Failure identification and recovery, where robot can detect failures in a manufacturing process and automatically recover from those failures
- Fixtureless environment, where robots can sense the environment and perform tasks on parts that are not in predefined location

Projection and Superimposition on AR Tags
Developed CV algorithms to detect AR tags in a video, decode it and project a virtual cube on it and also superimpose an image without the use of inbuilt functions for edge detection, homography and warping.



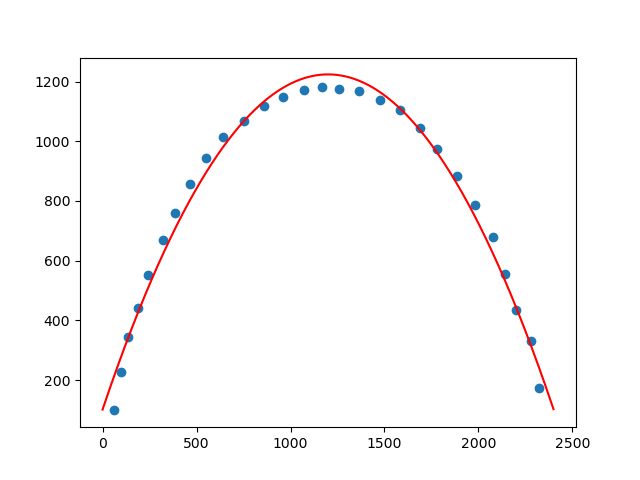
Tracking and Curve Fitting
Used Computer Vision tools to track a red ball on a white background with and without noise.
The tracked points were used to for fitting to find the equation of the trajectory followed by the ball using the least squares method



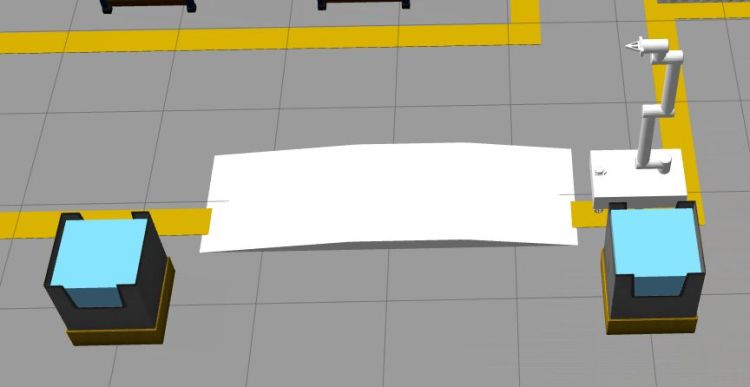
Mobile Industrial Manipulators

Designed and simulated 2 types of 6 wheeled differential drive robots with different suspension mechanisms and performed a comparative study in order to pick the right robot for a given task
Designed and studied a 6 DOF manipulator with a parallel jaw gripper using Moveit.
Integrated the mobile robot and the manipulator and simulated a pick and place scenario typically found in an industrial environment, to move a cylindrical billet.
Development of Industrial AGVs
Developed a line following robot using reflectance sensors with a HD camera mounted on top with multiple degrees of freedom that was controlled in real time using a web app and live streamed the feed (over the internet with a delay of 6-30s) from the HD camera onto the target website.
Developed a vison based line following AGV for industial use with a LIDAR mounted on top as a safety sensor.
Developed a master slave AGV setup for use in repetitive environments to minimize costs in multi-robot systems aiming to replace conveyors.

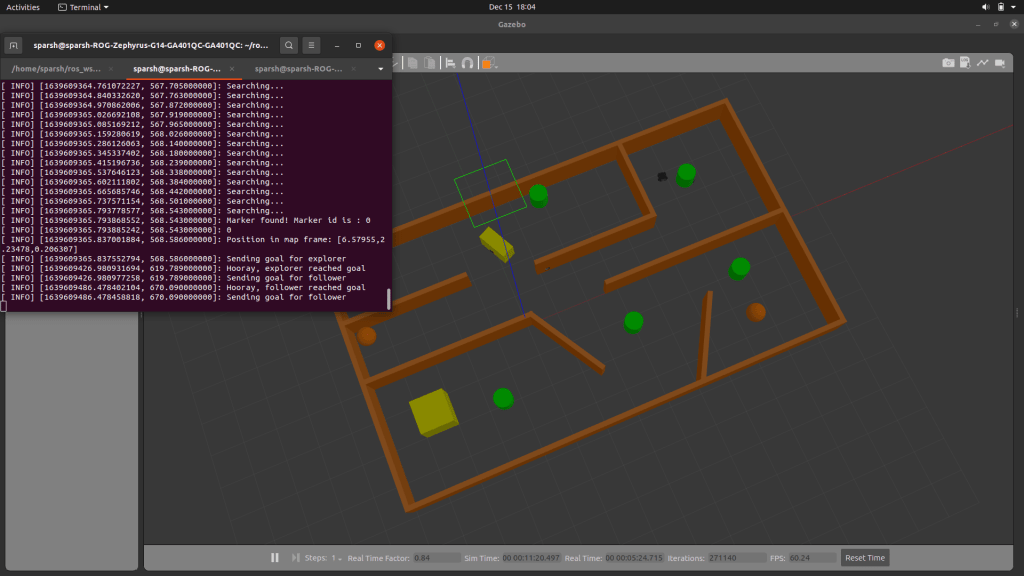
Search And Rescue Simulation

Developed a code to simulate a search and rescue operation using 2 turtle-bots.
The first Turtle bot sized up the scene and identified locations where rescue operations were required by reading Aruco codes in the environment and sorted the rescue locations in a priority order using the Aruco Ids.
The Second Turtle bot visited the rescue locations in the priority order.

Turn Key Surface Coating System
Assisted in the project fulfillment of a semi-automatic surface coating system for a Korean car manufacturer
Designed the conveying and friction indexing mechanism for the component.
Created the safety logic and ensured poka yoke for the entire system

Maze Solving Algorithm (DFS)
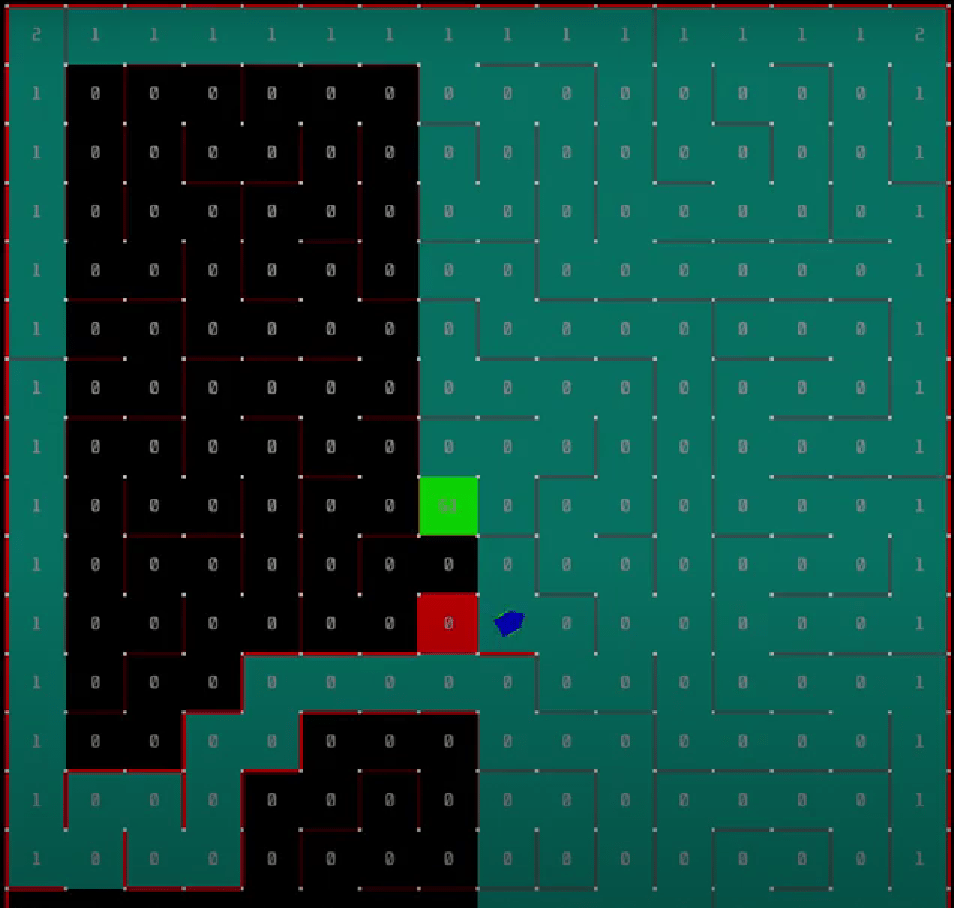
Implemented a Depth First Search Algorithm with backtracking methods to move a robot from start to the center of a maze(16X16)
Interfaced the developed code to run the robot in the 3rd party simulator (provided), with an API.
BAJA SAE
Led a team of 25 individuals in the capacity of a Vice Captain to compete at BAJA SAE India competitions for multiple years, overlooking all aspects that go into the development of a vehicle from conceptualization to being market ready.
Developed systems for dynamic data acquisition to tune suspension and transmission components
Developed a single piston brake Calliper from scratch

Parallel Steering Mobile Robot

Designed and simulated a simple parallel steering robot with a LIDAR.
Controlled the robot using Teleop and visualized the LIDAR output using Rviz.
Designed a PID controller for the motion of the joints and transmission.
